By Natalie Nelms
Its amazing what you can create when you pair a few spare parts lying
around and an inventive imagination. In this instance, these ingredients
gave birth to BeagleBot a small test robot for localization algorithms!
After seeing demos of SLAM at home brew robotics society meetings,
along with people using Kinects as cheap lidars, I was hooked on robot
localization, explained BeagleBots creator Nathaniel Lewis on the origins
of this project. I wanted to learn everything I could about these
algorithms and I needed a test platform. So, I took parts I had laying
around the house, along with a replacement Neato Lidar I found online and built BeagleBot.

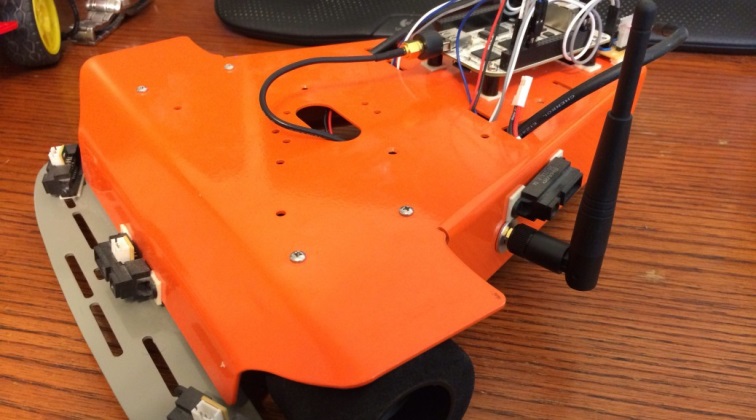
Lewis constructed his little venture out of the following parts to
effectively experiment with the workings of robot localization:
TIs Sitara-processor-powered BeagleBone Black
Robotics Connection Stinger Chassis
– Simple machined aluminum frame
– Simple three wheeled design: two gearmotors + encoders and a model aircraft tail wheel for a caster
Custom cape
– 2x SN75540 motor drivers
– 5V to 3.3V conversion logic for encoders
– Driver logic for Neato Lidar (MOSFET and driver attached to PWM line)
UWN200 WiFi adapter
Neato XV-11 Lidar
1080p USB Webcam
GP2D12 Infrared Range Finders
5600 mA/h USB battery pack for logic (one of those cell phone charger packs)
2100 mA/h 2 cell LiPo for motors
Lewis also explained in more detail the reasons behind why he chose the BeagleBone Black to serve as the brains for his robot. I chose the BeagleBone because of the I/O capabilities, the form factor, and the price. The plethora of GPIO and PWM meant I didnt need external microcontrollers to control motors or sensors. The small size meant I could shove it just about anywhere, and the price was unbeatable for the features. I still remember shelling out more money for a Parallax Basic Stamp 2 ten years ago, than I did for the BeagleBone Black!
The finished product did not come without a few hiccups, however. Lewis divulged some challenges that he experienced while building his robot including trouble counting encoder pulses, getting Xenomai to work with the BeagleBone Black and accurately timing the input pulse from sonar. Thankfully, these issues were combatted with Lewis creativity and experience, and the BeagleBot became a functioning reality after some trial and error.
The maker also has big plans for the future developing a low-cost motion capture system as an independent research project at University this semester!
For more information on the BeagleBot and to stay up-to-date with Lewis endeavors, visit:
http://nathanielrlewis.com/beaglebot.
Want to chat with us about this project? Tweet us at @BeagleBoardOrg!