By Natalie Nelms
You dont have to be a child to play with remote-controlled cars.
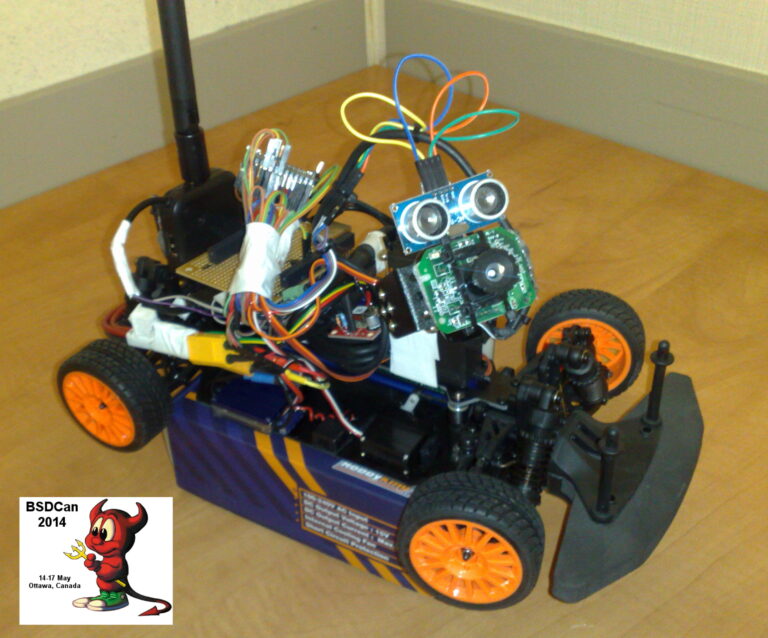
The BeagleROV is an exciting toy that would bring any adult Maker
back to the good ole days except this robot packs a bit more punch
than the classic Nascar minis. Powered by the TI Sitara AM335x processor-based
BeagleBone Black, the BeagleROV has a multitude of capabilities
that are all controlled remotely via the robots web application.
In addition to the vehicles remotely controlled technology,
the BeagleROV includes the following features:
Wi-Fi access to the web app with an adhoc Wi-Fi network
Real-time video processing with OpenCV
GPIO management to drive MOSFET actuators
Ultrasonic distance sensor reading
This car definitely isnt your granddads model.

When asked why he developed this machine, creator Fabio Balzano
explained that he wanted to create a dynamic robot. My company
is working in this kind of research and development, and we are especially interested in autonomous UAVs and ROVs, explained Balzano.
The development of this vehicle did not come without complications,
however. The HUB USB power wires were cut to prevent USB host port
power down, detailed Balzano on the challenges of building his robot.
I was able to solve this problem, though, by soldering a custom cape to connect all of the I/O.
The BeagleROVs technology also transcends the confines of the Earths
surface and has been utilized in underwater exploration. The marine
version of the robot is able to collect imaging and sample data from
depths of up to 1,000 meters below the surface, which has sufficiently
helped organizations like Marine Applied Research and Exploration
gather the information that they need to learn more about the oceanic
habitat. The ability of BeagleBone Black to support OpenCV real-time
video processing really comes into play here as explorers look to
stream live footage of the ever-intriguing mystery that is the sea.
Looking towards the future, Fabio and his team plan to develop a
more advanced and improved version of this robot. The BeagleROV has
proven to not only serve as a hobbyist project, but has also shown
to be beneficial in the exploration of our wondrous planet. It is an
exciting time for the BeagleROV team and we are eager to see what
future models will be capable of.
For more information on the BeagleROV and for a detailed look
at the code that Fabio implemented in the vehicle, you can visit
the projects site at: https://bitbucket.org/fabiodive/bsdcan2014.
Want to collaborate or need help with your project? Feel free to
contact Fabio at: fabio.balzano@elfarolab.com.
Want to chat with us about this project? Tweet us at @BeagleBoardOrg!